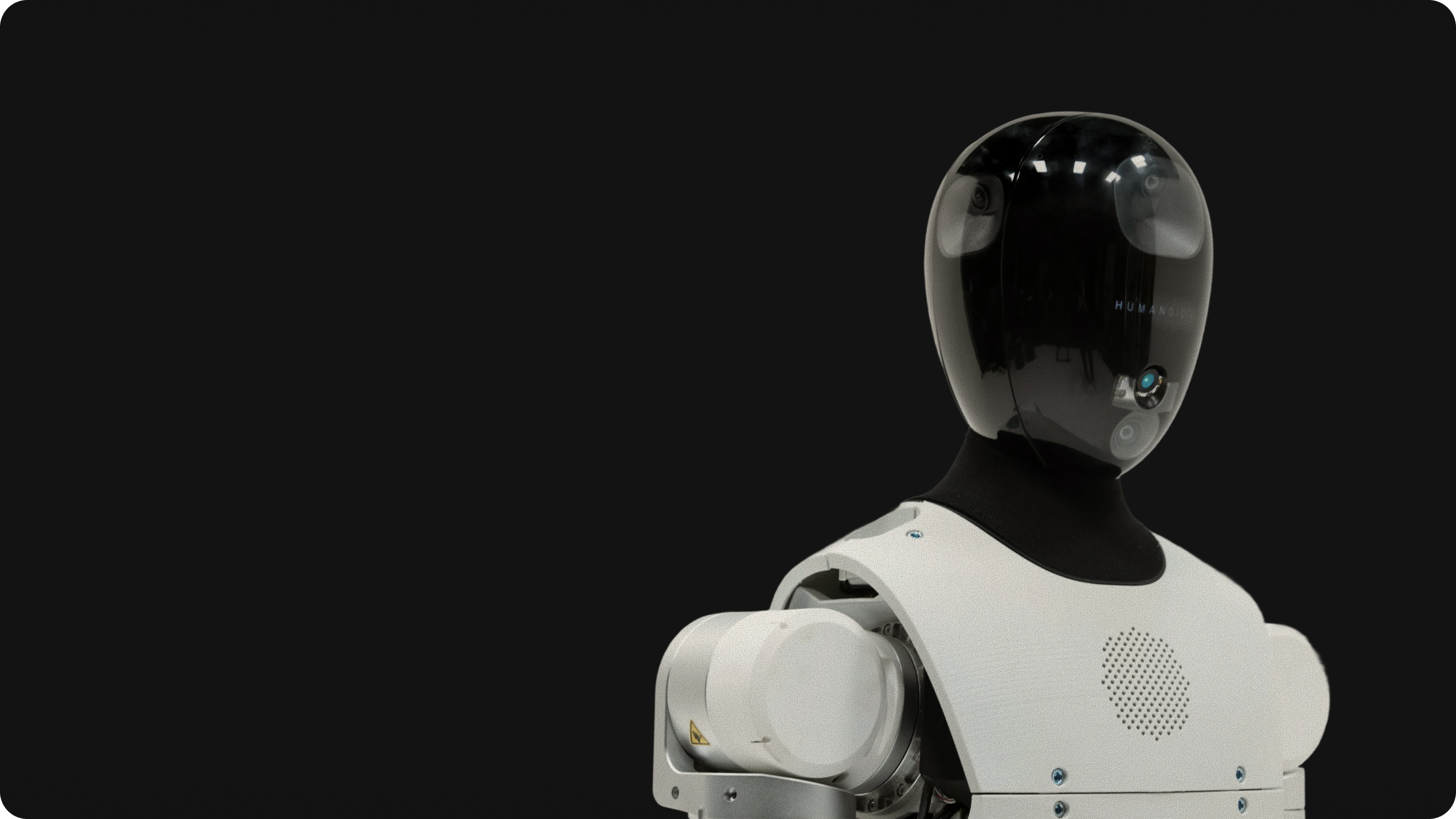
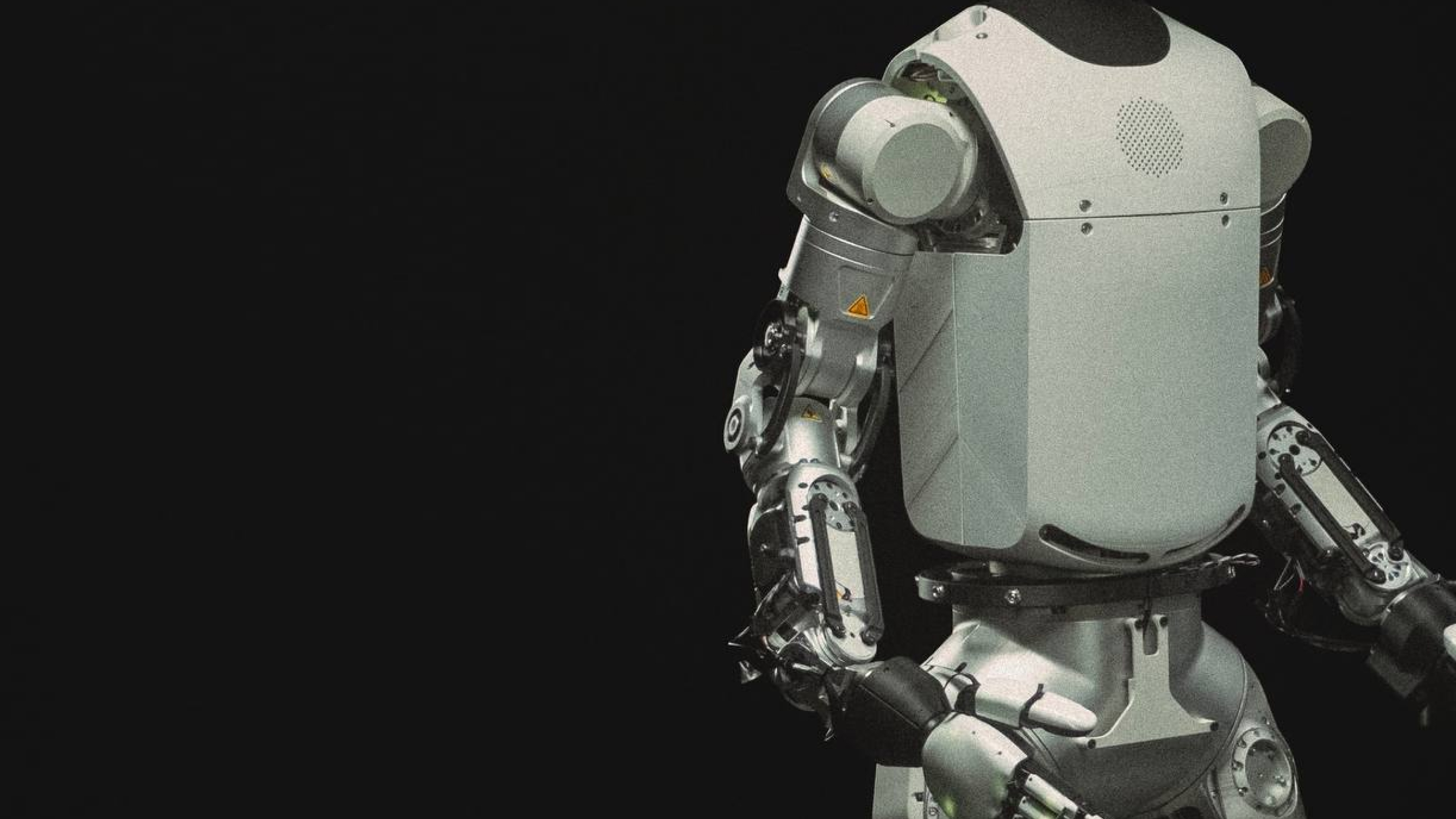
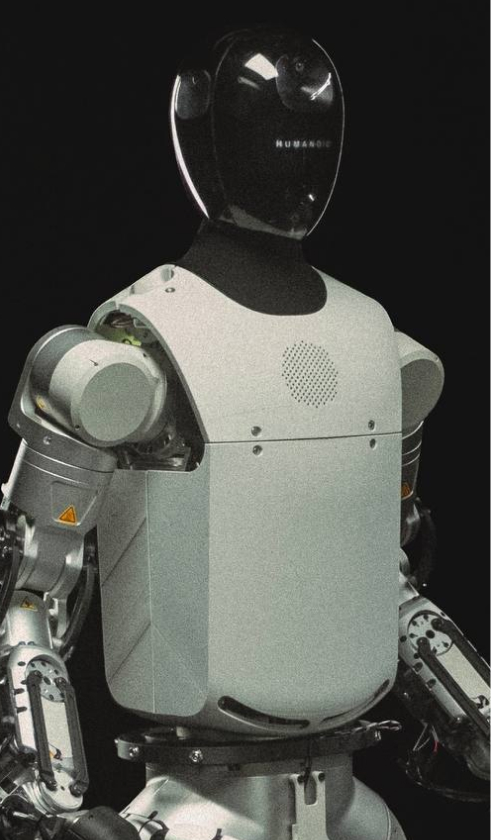
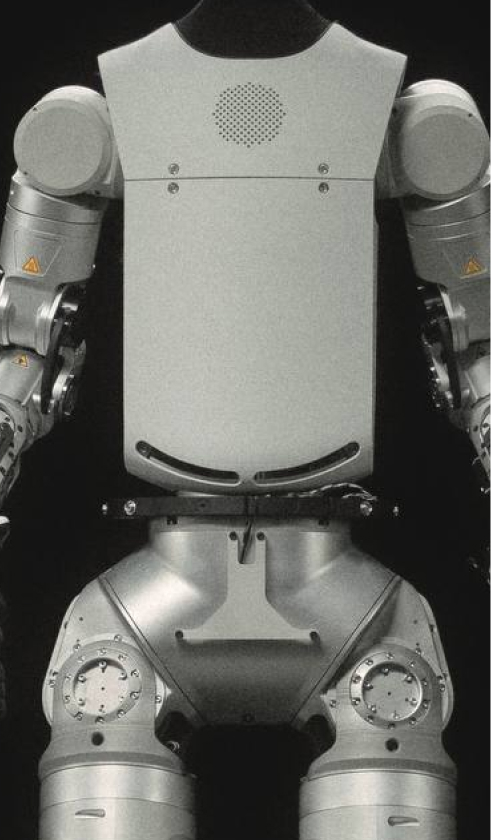
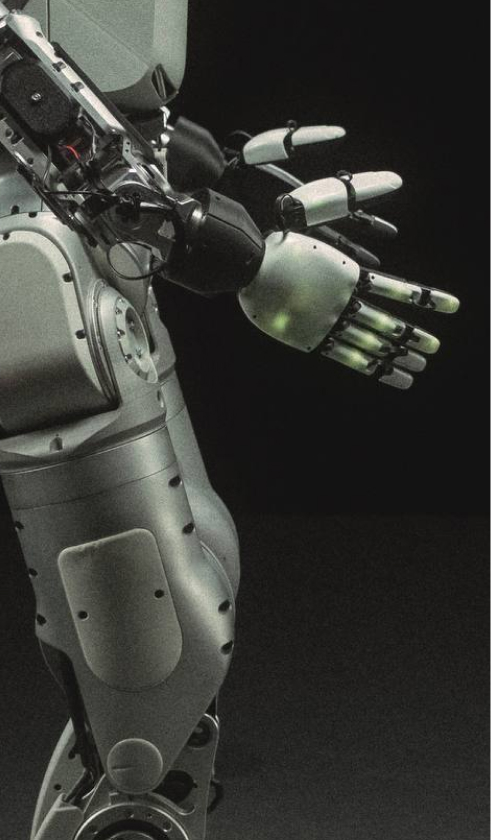
HMND 01 ALPHA BIPEDAL
Built in five months, walking stably after only two days of training


HMND 01 ALPHA BIPEDAL
Structure. Intelligence. Motion. Built as one.
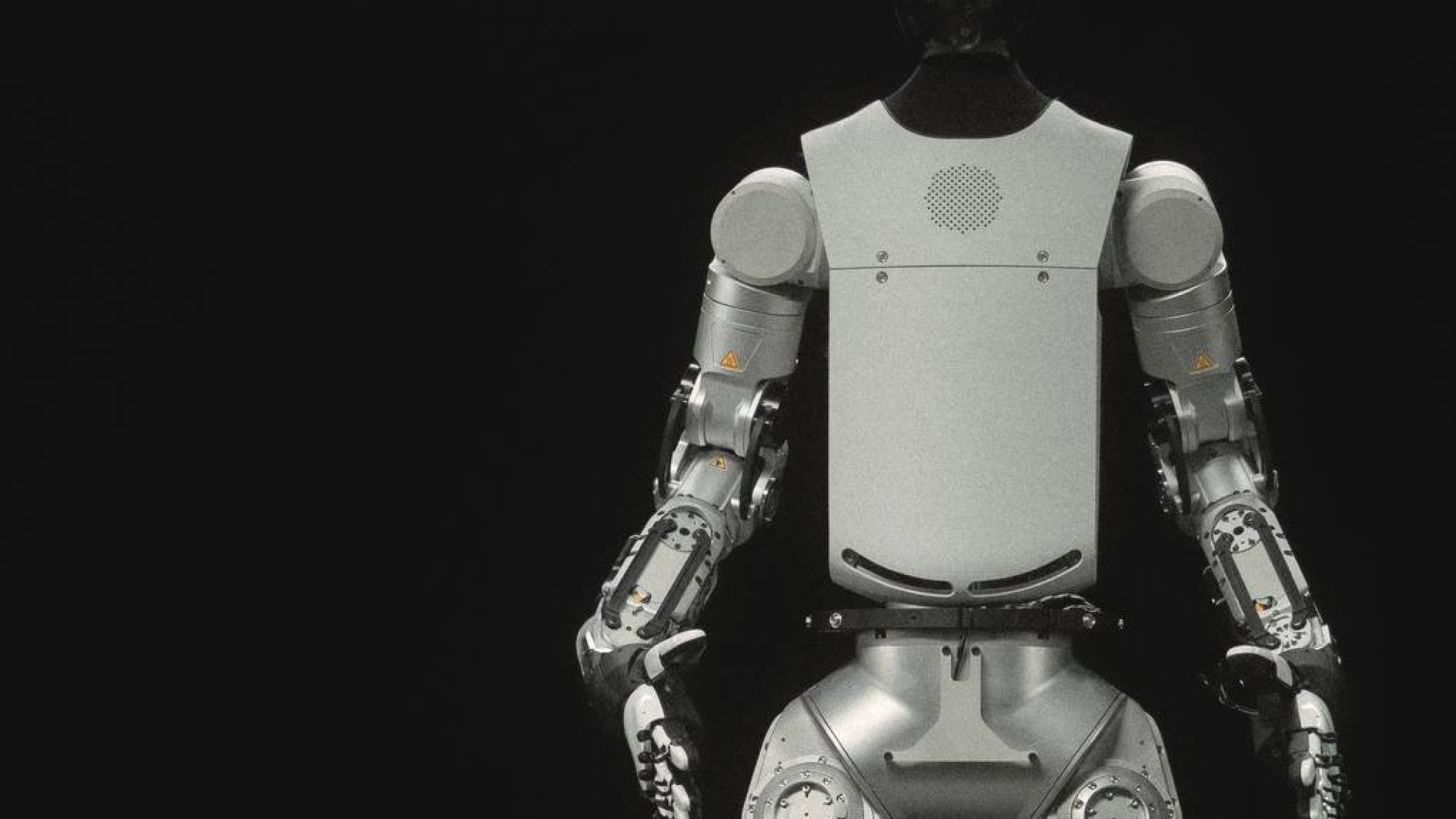
HMND 01 ALPHA BIPEDAL
Structure. Intelligence. Motion. Built as one.
Built in five months, walking stably after only two days of training
HMND 01 ALPHA BIPEDAL
HMND 01 ALPHA BIPEDAL
Have another role in mind? Let us know what you could bring to the team.